Robotclub Malaysia is Official Distributor of Open Manipulator in Malaysia
We have supplied, given training and support to a lot of universities, politeknik, institution, commercial sector.
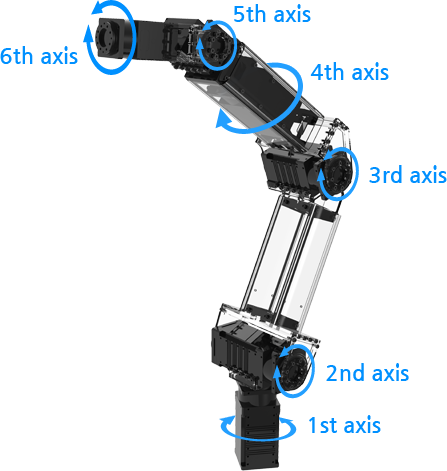
Product Name : OpenMANIPULATOR-P
Model Name : RM-P60-RNH
Feature
User Programmable Open-Source Manipulator System
Modular Platform for Easy Maintenance and Customization
No External Control Box & High Weight-to-Payload Ratio

Package Component
|
OpenMANIPULATOR-P
|
1 (Fully-assembled)
|
|
Hard Case
|
1
|
|
U2D2
|
1
|
|
Spare Cables (4P, 2P)
|
1
|
|
Screw Sets (WB M3x8 etc)
|
1
|
|
4P Expansion Hub
|
1
|
H/W Specification
|
DOF
|
6
|
|
Payload (kg)
|
3
|
|
Repeatability (mm)
|
±0.05
|
|
Speed (Each joint, deg/sec)
|
180
|
|
Weight (kg)
|
5.5
|
|
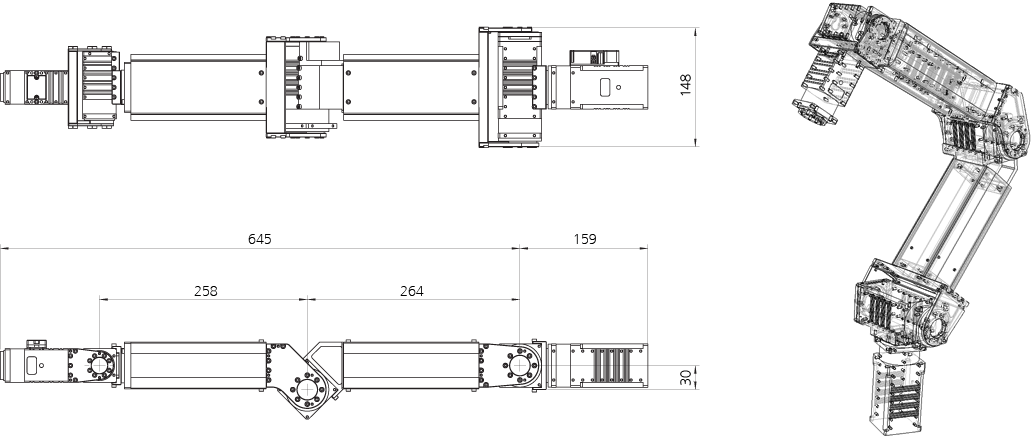
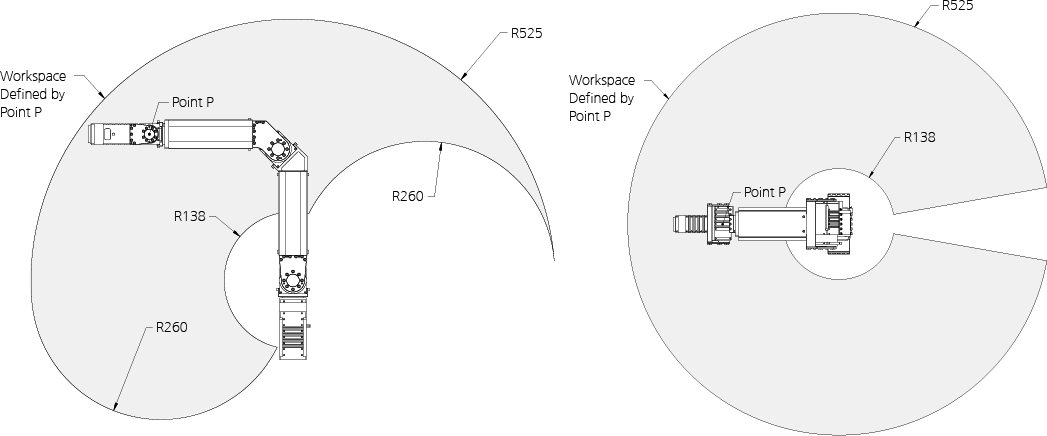
Reach (mm)
|
645
|
|
Rated Voltage (VDC)
|
24
|
|
Communication
|
RS-485 (Multi Drop Bus)
|
|
Motor Output / Joint
|
200W / 2ea
100W / 2ea
20W / 2ea
|
|
Software
|
ROS (Ubuntu Linux)
|
|
Controller
|
PC (Not Included)
|
S/W Specification
ROBOTIS Manipulator controller package based on integrated software
OpenMANIPULATOR-P Library (Kinematics,Trajectory and Dynamixel Controller).
GUI program package for setting and monitoring control parameters.
MoveIt! package for OpenMANIPULATOR-P
Simulation package based on Gazebo Simulator
Teleoperation examples of keyboard and Joystick

Purpose
Research and Education
Kinematics and Dynamics Experiment
Research and Design a Dual Arm Robot
Build a Mobile Robot System
Industrial Operation
Inspection Equipment
Small-Scale Delivery System
Caution
Power supply and PC are not included.
Please purchase separately according to your usage environment.
Factory Default Settings
(User can change various settings including ID and baud rate according to environment)
If you purchase RH-P12 (Robot Hand) and RM-P60-RNH(OpenMANIPULATOR P) together, they will be shipped out together in the OpenMANIPULATOR P`s case.
Features of DYNAMIXEL P
All-in-one Modular Design
DC Motor + Controller + Driver + Sensor + Cycloid Reduction Gear
Compact and Lightweight
Minimized module size with compact and lightweight cycloid reduction gear.
High weight-to-output ratio(0.05Nm/g)
High impact resistance ( over 400%)
High Precision and Low Backlash
Contactless (Magnetic) Absolute Encoder(by AMS) & Incremental Encoder for Precise Positioning
Low backlash (3~4arcmin)
Performance data provided tested by Korea Laboratory Accreditation Scheme(KOLAS)
Current-Based Torque Control
High speed current sensing algorithm and current feedback control
Triple-loop control for current, speed and position feedback.
User Friendly development environment
Provide C language based library
Various solution examples (C++, LabVIEW, C#, eclipse, JAVA, etc..)

Links
· ○ e-Manual
· ○ Drawing
· ○ DYNAMIXEL SDK









