


Research Robot Platform
|
What is Research Robot?
Much of the research in robotics focuses not on specific industrial tasks, but on investigations into new types of robots, alternative ways to think about or design robots, and new ways to manufacture them but other investigations, such as MIT's cyberflora project, are almost wholly academic.
A first particular new innovation in robot design is the open-sourcing of robot-projects. To describe the level of advancement of a robot, the term "Generation Robots" can be used. This term is coined by Professor Hans Moravec, Principal Research Scientist at the Carnegie Mellon University Robotics Institute in describing the near future evolution of robot technology. First generation robots, Moravec predicted in 1997, should have an intellectual capacity comparable to perhaps a lizard and should become available by 2010. Because the first generation robot would be incapable of learning, however, Moravec predicts that the second generation robot would be an improvement over the first and become available by 2020, with the intelligence maybe comparable to that of a mouse. The third generation robot should have the intelligence comparable to that of a monkey. Though fourth generation robots, robots with human intelligence, professor Moravec predicts, would become possible, he does not predict this happening before around 2040 or 2050.
The second is evolutionary robots. This is a methodology that uses evolutionary computation to help design robots, especially the body form, or motion and behaviour controllers. In a similar way to natural evolution, a large population of robots is allowed to compete in some way, or their ability to perform a task is measured using a fitness function. Those that perform worst are removed from the population, and replaced by a new set, which have new behaviours based on those of the winners. Over time the population improves, and eventually a satisfactory robot may appear. This happens without any direct programming of the robots by the researchers. Researchers use this method both to create better robots, and to explore the nature of evolution. Because the process often requires many generations of robots to be simulated, this technique may be run entirely or mostly in simulation, then tested on real robots once the evolved algorithms are good enough. Currently, there are about 10 million industrial robots toiling around the world, and Japan is the top country having high density of utilizing robots in its manufacturing industry.
~ Information are obtained from Wikipedia
Ø Robot Platform
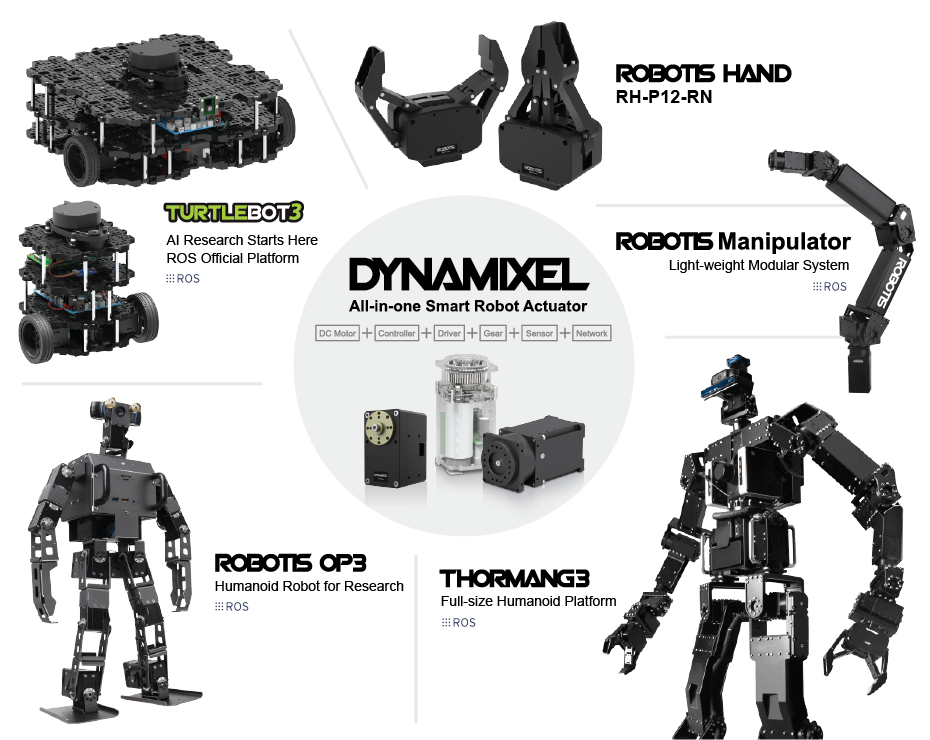
Our DYNAMIXEL system offers the best and most optimized environment for building a robot system. Robot developers use DYNAMIXEL actuators to build robots in various forms, such as manipulators, robot hands, mobile robots, and articulated robots, including humanoid robots.
Ø Humanoid Platform
Many robot engineers long to build humanoid robots that resemble the form of humans, and it is also the most built robot that many researchers and developers using DYNAMIXEL actuators make.
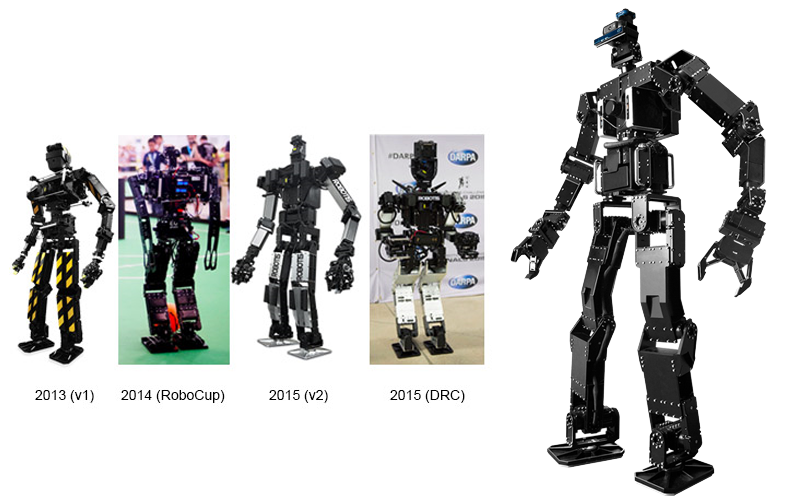
THORMANG was first presented at the 2015 DARPA Robotics Challenge, a disaster relief robot competition. It was developed based on our high performance actuator, the THORMANG was first presented at the 2015 DARPA Robotics Challenge, a disaster relief robot competition. It was developed based on our high performance actuator, the DYNAMIXEL Pro, and is the world’s first open source full sized humanoid platform that can be put into an actual field. It is highly recognized as a learning and research platform robot thanks to its open design and sources.
Our open-source based humanoid platforms have become a foundation stone in building up the DYNAMIXEL ecosystem and have become the benchmark for many robotics researchers. ROBOTIS has been advancing its humanoid robots for a long time, allowing us to take a step closer to the future we had only dreamed of.
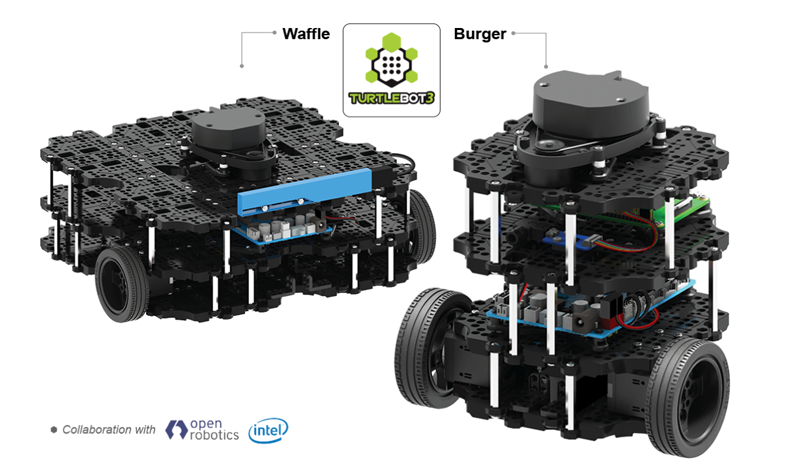
Ø Mobile Platform
TurtleBot3 which was developed in collaboration with Open Robotics and released in 2017 is an official ROS education platform. It is a mobile robot with a modular structure developed for research based on ROS and our DYNAMIXEL X series. The advantage of the product is that it is low cost and expandable, and its modularity allows easy maintenance. The software is also open source allowing users to freely share and use its source. The TurtleBot3 can be used in any field for study and research that apply SLAM, navigation, autonomous drive, and mobile systems.
Ø Manipulator
ROBOTIS Manipulator-H, a robotic arm system based on the DYNAMIXEL Pro, is a universal system that can be operated in various environments with its lightweight, modular structure and allows easy maintenance and transformation. It is based on open source and can be used for learning and research for kinematics and manipulation. Thanks to its human arm sized hardware configuration, it can be used as a robot system that drives aircraft and automobiles, and can be used as a remotely operated robot in a disaster scene. Its powerful output (compared to its weigh) and portability make it easy to utilize when working in a narrow space or to construct a system for performing at exhibition halls.
Ø Robot Hand
Based on the compact DYNAMIXEL MX series, the ROBOTIS Hand is easy to use and mount on humanoids or mobile robots. When attached to DYNAMIXEL based robotic arm, it can be connected in a daisy chain topology for immediate operation without additional work.
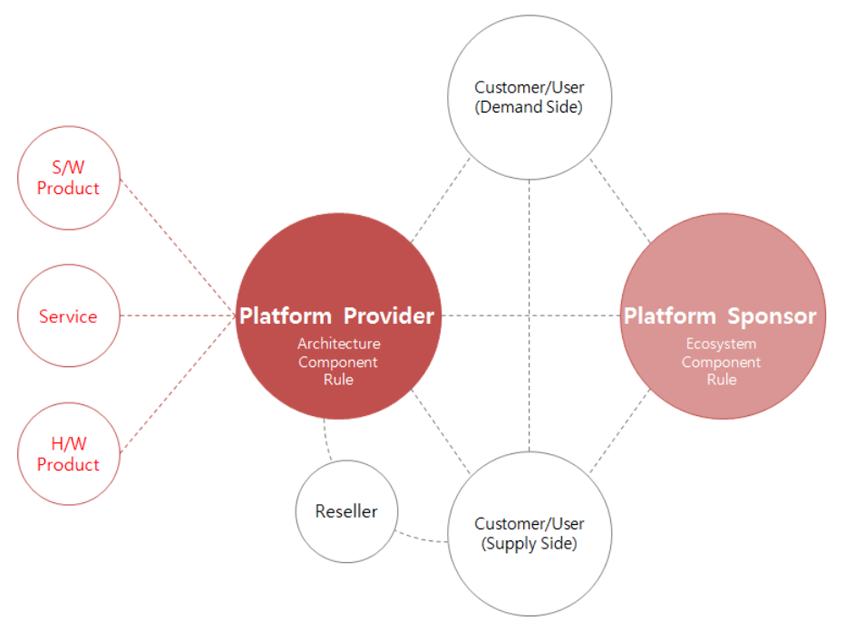
Ø Open Source Community and DYNAMIXEL Ecosystem
ROBOTIS values being able to provide robot researchers and developers a system to create and build robots and aims to be a platform provider that closely work with various open platform sponsors. To successfully do so, we commercialize easy to use high performance DYNAMIXEL actuators and platforms and continue to expand our product line-ups through ongoing research and development. In addition to this, by opening our programming software to the public, it provides an opportunity for beginners to easily implement and operate robots of their dreams.
|




Category:
| -There is no product available. |




