


DYNAMIXEL X Series
|
DYNAMIXEL X-Series is a new line-up  Basic Feature
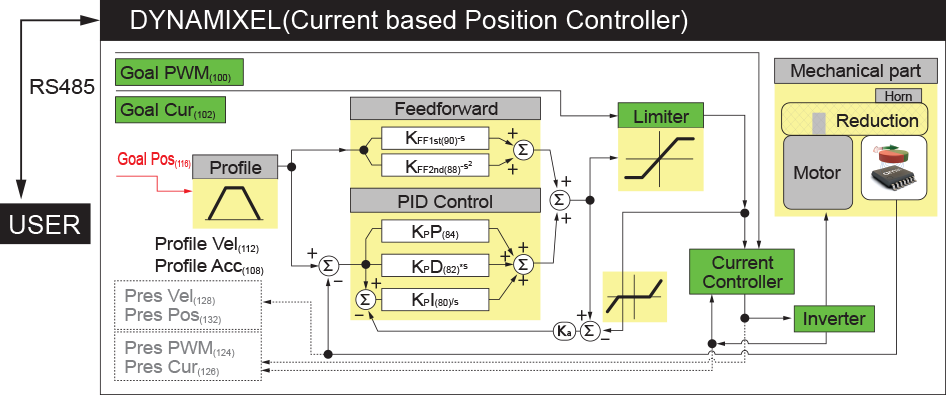
Various Control Functions
 Sophisticated Control Architecture
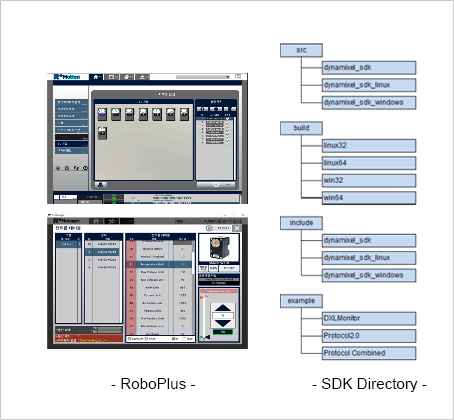
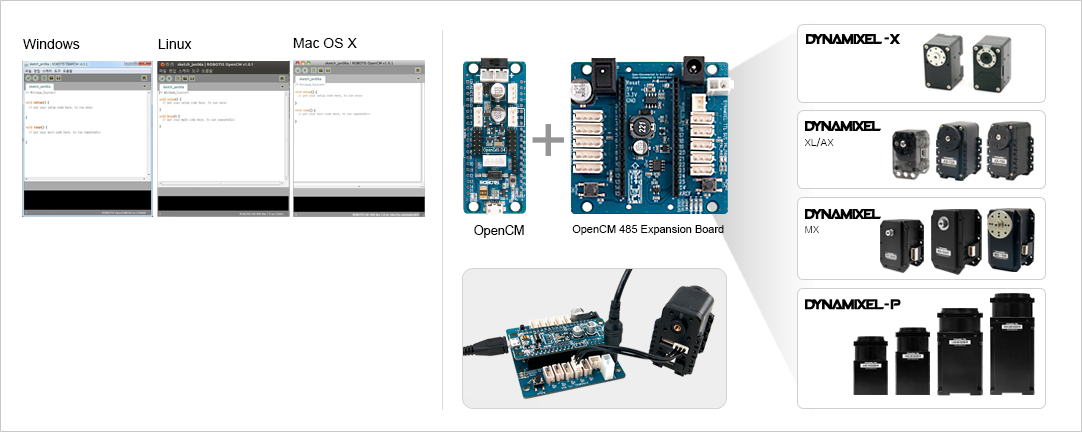
 New H/W Architecture ▪ Improved Torque, Compact Size 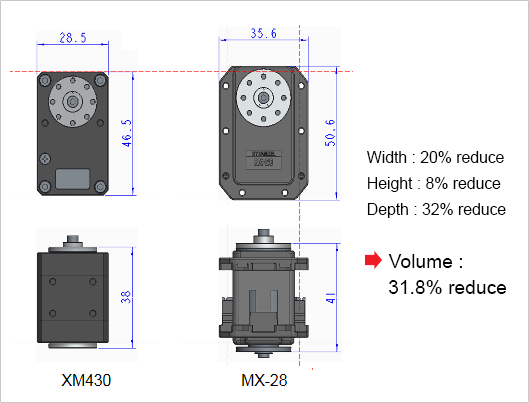 ▪ Compact Design ▪ Direct Screw Assembly to the Case (without Nut Insert) 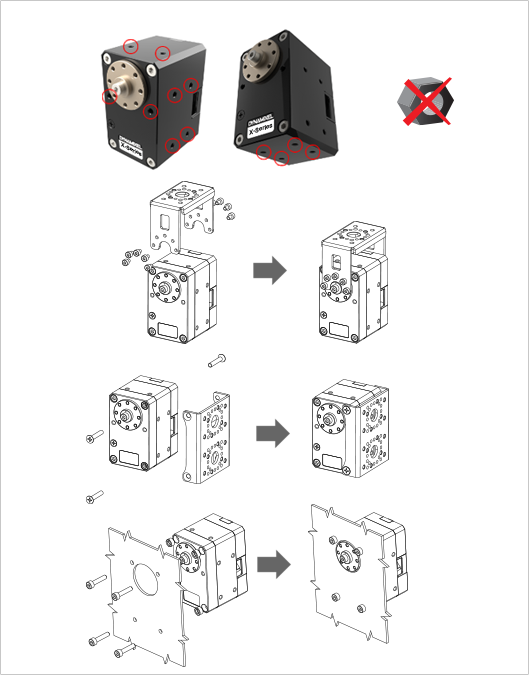 ▪ Aluminum Case: Improved Heat Sink Featuring & Enhanced Durability 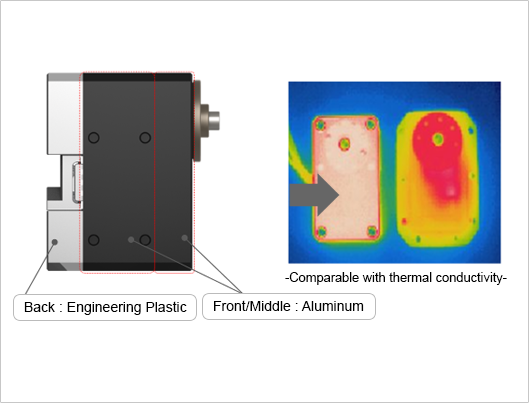 ▪ Hollow Back Case Minimizes Cable Stress ▪ Cable cover can Prevention Cable Seperation 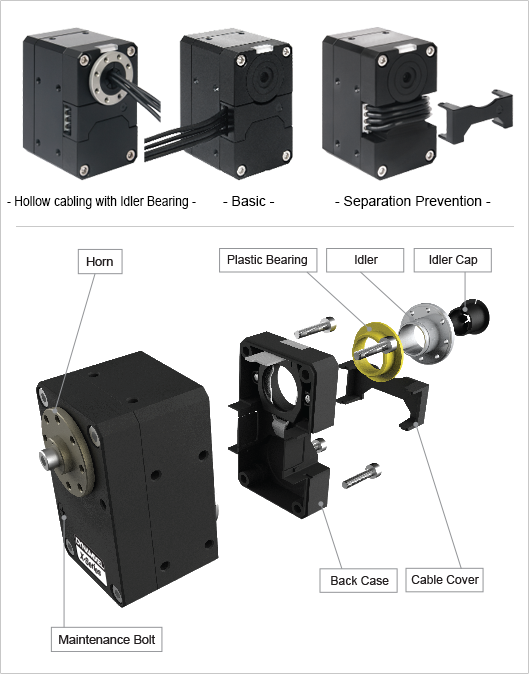 Development Environment
|

Category:
| -There is no product available. |




